Steve Nguyen

Background
- Since 2018 I am a Post-Doc researcher at the LaBRI (Univ. Bordeaux, France), working with Hugo Gimbert (LaBRI, Univ. Bordeaux, France) on an agricultural robot (BipBip).
- From 2017 to 2018 I was a research engineer at AST (SATT Aquitaine) working with Serge Chaumette (LaBRI, Univ. Bordeaux, France) on a UAV project.
- From 2015 to 2017 I was a Post-Doc researcher at the Olivier Ly's Rhoban team (LaBRI, Univ. Bordeaux, France).
- From 01/2014 to 12/2014 I was a Post-Doc researcher at the Pierre-Yves Oudeyer's FLOWERS team (INRIA Bordeaux, France) working on the Poppy project.
- From 2010 to 2014 I was a Post-Doc researcher at the LPPA (Collège de France, Paris, FRANCE) working in Jacques Droulez's Probabilistic Approach and Active Perception group.
- From 2006 to 2010 I did my PhD Thesis at ISIR (UPMC Paris 6, FRANCE) under the supervision of Jean-Arcady Meyer and funded by the company BVS.
- I completed my Engineering School (french Grandes Écoles) at the ECE along with a Masters Degree at the UPMC University (Paris, FRANCE).
Here is a CV (last updated: 2018).
Research interests
I am interested in understanding the sensory-motor loop in animals (including humans) through computational modeling.
My approach thus combines Artificial Intelligence, Neurosciences, Cognitive Sciences, Computer Sciences and Robotics.
Some of my research projects:

RoboCup humanoid soccer competition
(Rhoban Team, Bordeaux University, FRANCE)
The RoboCup is an international robotics competition gathering around 3500 participants from 50 countries. The aim is to promote and push forward Robotics and Artificial Intelligence by offering a publicly appealing challenge. The long term goal of the RoboCup is to see a fully autonomous soccer team of robots beat the "human" world champion team in 2050.
I participate with the Rhoban team in the Kid-size Humanoid soccer league since 2015. I am involved in the robot conception and fabrication, vision system and localization. Our results so far:
- 2017: Winner of Humanoid Kid size soccer competition, Winner of the Drop-In challenge, Winner of the RoboCup Best Humanoid Award.
- 2016: Winner of Humanoid Kid size soccer competition
- 2015: 4th position
Modeling of human locomotion
(in collaboration with Prof. Alain Berthoz, LPPA, Collège de France, FRANCE)
We try to understand invariant features observed in human locomotion (planned trajectories, gaze behavior…).
By running experiments in humans with motion capture and eye tracking we explore the way some stereotypical behaviors are modified according to imposed conditions.
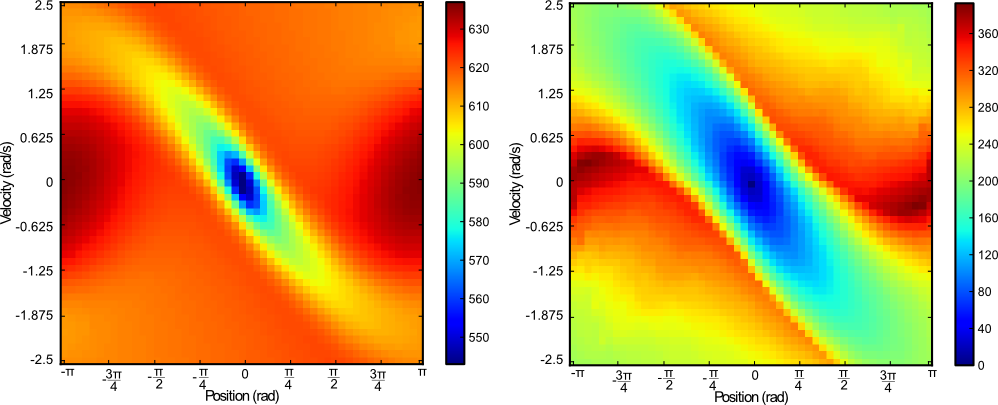
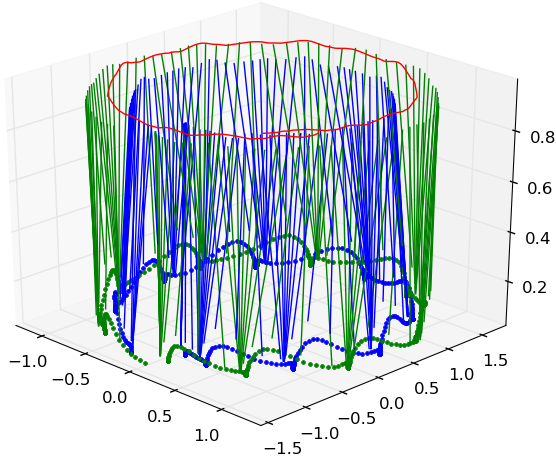
Control and planning under uncertainty
(in collaboration with Dr. Jacques Droulez and Pierre Bessière, LPPA, Collège de France, FRANCE)
We develop a different approach in control and planning under uncertainty taking unto account a probabilistic view of distances.
This method appears to be very efficient from a computational point of view, which may unlock some previously inaccessible problems due to the curse of dimensionality.
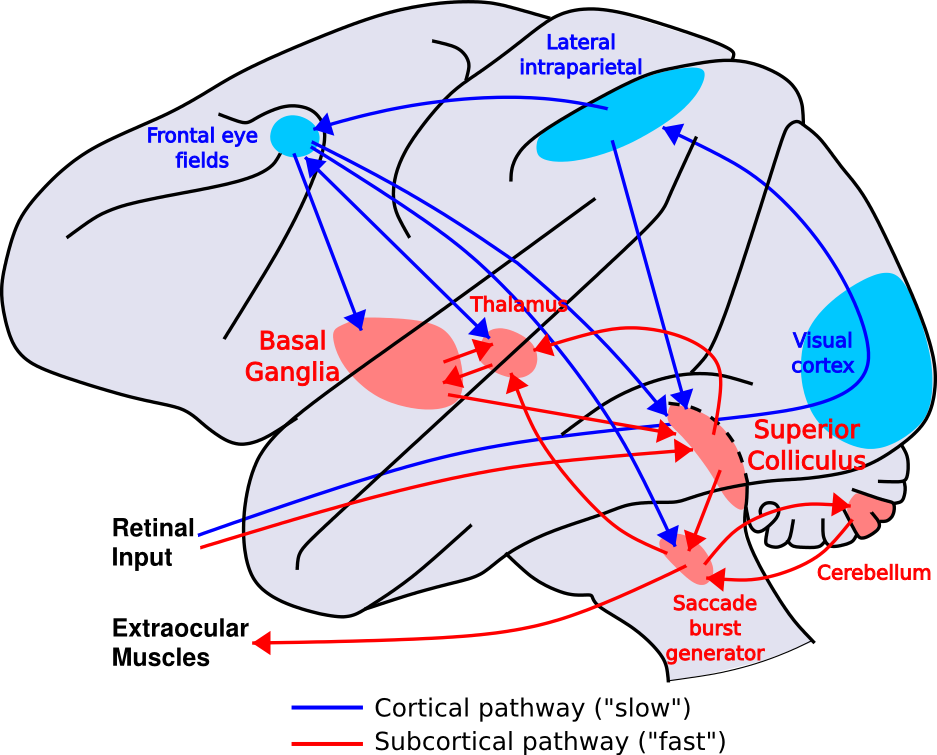
Modeling of the saccadic system
(in collaboration with Dr. Benoît Girard, ISIR, UPMC Paris 6, FRANCE)
We try to understand the circuitry of the saccadic system and in particular the role of the different loops through the Basal Ganglia in the selection of visual targets.
To do so, we implement neurocomputational models based on several hypotheses that we test on simulation (or on robots) in order to propose predictions useful to biologists (as we hope so).
Projects
- I am currently a member of the Rhoban Robocup team in the Humanoid Kid-size league (2017 and 2016 world champions)
- I was involved in the Poppy project: Poppy
- Past projects in which I was involved: RoboSoM (European project ICT-2009.2.1), ROMEO (French government), ROMEO 2 (French government), ICEA (European project IST 027819), BIOTACT (European project ICT-2007.8.3), INTERACT (ANR, French government).
Contact information
mail: contact [at] s-nguyen.net